中科煜宸的激光選區(qū)熔化設(shè)備除了具有完善的硬件,,還配置了強(qiáng)大的控制管理系統(tǒng),。
設(shè)備主機(jī)均采用伺服控制原理的電氣系統(tǒng),,實(shí)現(xiàn)對伺服軸運(yùn)動的順序執(zhí)行和同步控制,。
多點(diǎn)位位移監(jiān)測和反饋系統(tǒng),,實(shí)現(xiàn)主機(jī)運(yùn)動軸系的閉環(huán)控制,,不斷鞏固設(shè)備加工精度,。
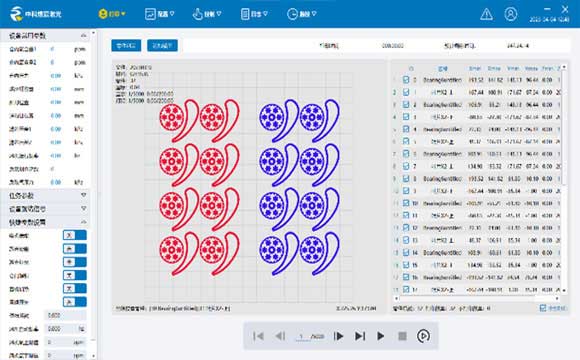
自主研發(fā)的成形軟件,可直接讀取各類商業(yè)軟件生成的打印數(shù)據(jù)包,,并配合已優(yōu)化的激光成形工藝數(shù)據(jù)完成加工,,實(shí)現(xiàn)激光選區(qū)熔化成形設(shè)備自動化運(yùn)行。
軟件系統(tǒng)能夠?qū)崟r(shí)顯示成形過程的關(guān)鍵參數(shù),,并在運(yùn)行過程中實(shí)時(shí)生成并更新過程記錄文件,,實(shí)現(xiàn)過程監(jiān)督和結(jié)果追溯,滿足大批量,、產(chǎn)業(yè)化加工的需求,。
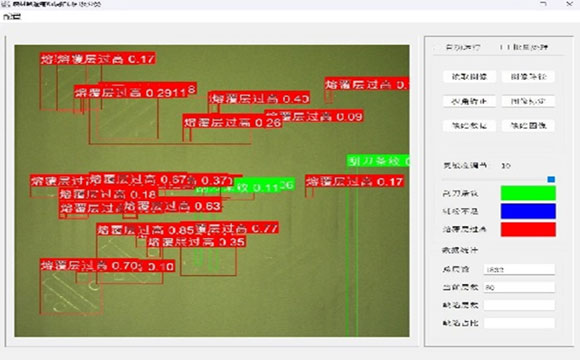
中科煜宸自主研發(fā)的Argus系統(tǒng),提供了鋪粉質(zhì)量監(jiān)控,、遠(yuǎn)程視頻監(jiān)控等功能,,
有效幫助金屬增材制造過程實(shí)現(xiàn)“智能識別、預(yù)置處理,、遠(yuǎn)程控制,、人工輔助”的智能化工廠級品質(zhì)控制模式。
中科煜宸還開發(fā)了推動金屬增材制造工廠智能化管理的MES系統(tǒng),,可結(jié)合設(shè)備硬件條件和加工服務(wù)需求,,實(shí)現(xiàn)集群化設(shè)備的產(chǎn)業(yè)化加工能力。
MES系統(tǒng)可以實(shí)現(xiàn)大批量設(shè)備的集中供氣,、供電和供粉,,實(shí)現(xiàn)能源集約化、能耗節(jié)約化,。
同時(shí),,通過對設(shè)備運(yùn)行信息的實(shí)時(shí)采集,MES系統(tǒng)可以統(tǒng)一管理打印加工任務(wù),、統(tǒng)一調(diào)配人工操作環(huán)節(jié),、統(tǒng)一安排設(shè)備加工計(jì)劃,,形成合理、高效的任務(wù)管理過程,。
軟件自動化程度高,,提供路徑文件高效解析與預(yù)覽、工藝參數(shù)包導(dǎo)入,、設(shè)備功能模塊實(shí)時(shí)控制,、設(shè)備狀態(tài)監(jiān)控與報(bào)警提示、打印日志記錄,、打印層圖像采集及存儲,、鋪粉質(zhì)量監(jiān)控(選配)、打印進(jìn)度三維圖像顯示(選配)等功能,,可實(shí)現(xiàn)設(shè)備24小時(shí)無人值守自動打印,。
軟件采用深度學(xué)習(xí)方法對打印過程中每層的鋪粉質(zhì)量進(jìn)行實(shí)時(shí)監(jiān)控,可對鋪粉質(zhì)量進(jìn)行“鋪粉不足”,、“刮刀條紋”,、“打印層過高”等缺陷進(jìn)行實(shí)時(shí)檢測與判定并進(jìn)行報(bào)警處理。
該系統(tǒng)可綜合比對設(shè)備硬件條件和加工服務(wù)需求,,優(yōu)化集群化設(shè)備的產(chǎn)業(yè)加工能力,。該系統(tǒng)對多設(shè)備集中供氣、供電和供粉,,實(shí)現(xiàn)能源集約化,、能耗節(jié)約化。通過對設(shè)備運(yùn)行信息的實(shí)時(shí)采集與大數(shù)據(jù)分析,,可以統(tǒng)一管理打印加工任務(wù),、統(tǒng)一調(diào)配人工操作環(huán)節(jié)、統(tǒng)一安排設(shè)備加工計(jì)劃,,實(shí)現(xiàn)合理,、高效的任務(wù)管理過程。

該軟件智能化程度高,,配有自主開發(fā)的工業(yè)互聯(lián)網(wǎng)專用高效時(shí)序數(shù)據(jù)庫系統(tǒng),,可對多臺套/多型號鋪粉設(shè)備打印過程進(jìn)行24小時(shí)不間斷的參數(shù)和視頻記錄,可在局域網(wǎng)內(nèi)實(shí)現(xiàn)遠(yuǎn)程訪問,,查看設(shè)備實(shí)時(shí)狀態(tài)和追溯歷史數(shù)據(jù),。

Robotmaster是一款專門為機(jī)器人應(yīng)用開發(fā)的離線編程軟件。 在機(jī)器人增材制造領(lǐng)域,,Robotmaster內(nèi)置了專門的激光熔覆,、3D打印等路徑規(guī)劃模塊,結(jié)合其特有的機(jī)器人運(yùn)動學(xué)自動優(yōu)化算法和強(qiáng)大的后處理,可以實(shí)現(xiàn)基于CAD/CAM的全路徑規(guī)劃流程,。 同時(shí),,針對特殊的增材應(yīng)用需求,Robotmaster開放了路徑導(dǎo)入模塊,,可以接入第三方或用戶自研的增材路徑算法,,再結(jié)合Robotmaster仿真與后處理模塊,實(shí)現(xiàn)更加廣泛的機(jī)器人增材制造需求,。